

All Classes Namespaces Files Functions Variables Typedefs Enumerations Enumerator Properties Friends Defines
Brief description of class still missing. More...
#include <DoubleMatrix.h>
Public Member Functions | |
| DoubleMatrix () | |
| DoubleMatrix (int ndim) | |
| DoubleMatrix (int nrow, int ncol) | |
| DoubleMatrix (const Matrix< double > m) | |
| DoubleMatrix (const DoubleMatrix &m) | |
| DoubleMatrix | eigenVectors (QVector< double > &eigenValues) const |
| bool | invert () |
| void | random (double min=0.0, double max=1.0) |
| void | rotation (AxisType ax, const Angle &angle) |
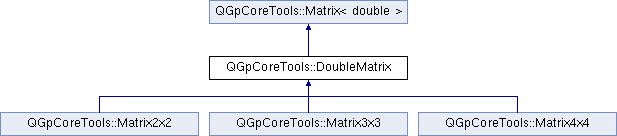
Brief description of class still missing.
NxM matrix with double values stored in the same way as LAPACK: iCol*nRows+iRow
| QGpCoreTools::DoubleMatrix::DoubleMatrix | ( | ) | [inline] |
: Matrix<double>() {}
| QGpCoreTools::DoubleMatrix::DoubleMatrix | ( | int | ndim | ) | [inline] |
: Matrix<double>(ndim) {}
| QGpCoreTools::DoubleMatrix::DoubleMatrix | ( | int | nrow, |
| int | ncol | ||
| ) | [inline] |
: Matrix<double>(nrow, ncol) {}
| QGpCoreTools::DoubleMatrix::DoubleMatrix | ( | const Matrix< double > | m | ) | [inline] |
: Matrix<double>(m) {}
| QGpCoreTools::DoubleMatrix::DoubleMatrix | ( | const DoubleMatrix & | m | ) | [inline] |
: Matrix<double>(m) {}
| DoubleMatrix QGpCoreTools::DoubleMatrix::eigenVectors | ( | QVector< double > & | eigenValues | ) | const |
Computes eigen vectors and values
References QGpCoreTools::Matrix< T >::at(), QGpCoreTools::Matrix< double >::columnCount(), QGpCoreTools::Matrix< double >::data(), QGpCoreTools::dgesvd_(), and QGpCoreTools::Matrix< double >::rowCount().
Referenced by QGpCoreTools::Covariance::stddev2D().
{
int m=rowCount();
int n=columnCount();
int minDim=m;
if(n<minDim) {
minDim=n;
}
eigenValues.resize(minDim);
double * a=new double[m*n]; // A copy of matrix values
double * u=new double[m*n]; // nullspace vectors
double * vt=new double[m*n]; // eigenvectors
double * s=eigenValues.data(); // eigenvalues
double * work=new double[10*minDim]; // work space
/*
Copy matrix to a because its content will be destroyed
*/
const double * aValues=data();
for(register int i=m*n-1; i>=0; i--) {
a[i]=aValues[i];
}
char jobu='A'; // flags to tell what to do in dgesvd_
char jobvt='A';
int lda=m;
int ldu=m;
int ldvt=n;
int lwork=10*minDim;
int info=0;
// LAPACK is probalby not thread safe... lock it
static QMutex mutex;
mutex.lock();
dgesvd_(&jobu, &jobvt, &m, &n, a, &lda, s, u, &ldu, vt, &ldvt, work, &lwork, &info);
mutex.unlock();
// Output is A=U * SIGMA * VT
DoubleMatrix um(m,m);
double * uValues=&um.at(0,0);
for(register int i=m*m-1; i>=0; i--) {
uValues[i]=u[i];
}
delete [] work;
delete [] vt;
delete [] u;
delete [] a;
return um;
}
| bool QGpCoreTools::DoubleMatrix::invert | ( | ) |
Based on LAPACK LU decomposition, for general matrix type.
Reimplemented from QGpCoreTools::Matrix< double >.
References QGpCoreTools::Matrix< double >::_d, QGpCoreTools::Matrix< double >::columnCount(), QGpCoreTools::dgetrf_(), QGpCoreTools::dgetri_(), and QGpCoreTools::Matrix< double >::rowCount().
{
ASSERT(rowCount()==columnCount());
double * values=_d->values();
int m=rowCount();
if(m==1) { // Not accepted by dgetrf
values[0]=1.0/values[0];
return true;
}
int n=columnCount(); // The order of matrix A
int lda=m; // The leading dimension of A
int * ipiv=new int[n]; // Pivot indices
int lwork=5*n; // Dimension of workspace
double * work=new double[lwork]; // work space
int info; // dimension of workspaces
// LAPACK is probalby not thread safe... lock it
static QMutex mutex;
mutex.lock();
dgetrf_(&m, &n, values, &lda, ipiv, &info);
if(info!=0) { // singular matrix
mutex.unlock();
delete [] ipiv;
delete [] work;
return false;
}
dgetri_(&n, values, &lda, ipiv, work, &lwork, &info);
if(info!=0) {
mutex.unlock();
delete [] ipiv;
delete [] work;
return false;
}
mutex.unlock();
delete [] ipiv;
delete [] work;
_d->swapRowColumn();
return true;
}
| void QGpCoreTools::DoubleMatrix::random | ( | double | min = 0.0, |
| double | max = 1.0 |
||
| ) |
Fills the matrix with random values between min and max
References QGpCoreTools::Matrix< double >::_d, QGpCoreTools::Matrix< double >::columnCount(), QGpCoreTools::Matrix< double >::rowCount(), and QGpCoreTools::Random::uniform().
{
Random r;
double * values=_d->values();
for(int i=columnCount()*rowCount()-1; i>=0;i--) {
values[i]=r.uniform(min, max);
}
}
| void QGpCoreTools::DoubleMatrix::rotation | ( | AxisType | ax, |
| const Angle & | angle | ||
| ) |
Sets matrix as a rotation matrix around axis ax. The angle is counted using the right hand convention. Angle is in radians. The matrix must be set to identity before. Transformation matrix (4x4) can be constructed with the same function.
Reimplemented in QGpCoreTools::Matrix4x4, and QGpCoreTools::Matrix3x3.
References QGpCoreTools::Matrix< double >::at(), QGpCoreTools::Angle::cos(), QGpCoreTools::Angle::sin(), TRACE, QGpCoreTools::XAxis, QGpCoreTools::YAxis, and QGpCoreTools::ZAxis.
{
TRACE;
switch (ax) {
case XAxis:
at(1, 1)=angle.cos();
at(1, 2)=-angle.sin();
at(2, 1)=angle.sin();
at(2, 2)=angle.cos();
break;
case YAxis:
at(0, 0)=angle.cos();
at(0, 2)=angle.sin();
at(2, 0)=-angle.sin();
at(2, 2)=angle.cos();
break;
case ZAxis:
at(0, 0)=angle.cos();
at(0, 1)=-angle.sin();
at(1, 0)=angle.sin();
at(1, 1)=angle.cos();
break;
}
}
